推荐:将 NSDT场景编辑器 加入你的3D开发工具链
介绍触觉设备是一种双向仪表/致动的人机界面,由人类操作员用于与计算机模拟虚拟环境进行主动交互。触觉设备可以是鼠标、方向盘、指垫、机器人手柄、抓手、操纵杆、手套、磁悬浮手腕,甚至是移动整个用户身体的运动平台的形式。它可用于模拟具有质量、阻尼、摩擦和刚度属性的环境,也可以模拟虚拟工具与其周围虚拟环境交互的机械行为。
CHAI3D 提供了一个名为 cGenericHapticDevice 的基类,它实现了一组与最常见的 3D 触觉设备进行通信的方法。触觉设备的末端执行器或手柄的位置可以通过使用getPosition(),getRotation(),getGripperAngleDeg()等方法读取。可选的用户开关或按钮可以通过调用getUserSwitch()来读取。
力和扭矩可以通过调用诸如setForce(),setForceAndTorque()和setForceAndTorqueAndGripperForce()等方法发送到触觉设备。
对于每种型号的触觉设备(例如delta.x,omega.x猎鹰,幻影等)CHAI3D 实现了一个特定的类(例如 cDeltaDevice、cPhantomDevice),该类继承自 cGenericHapticDevice,并通过从支持该设备的 API 调用特定命令来实现每个命令。
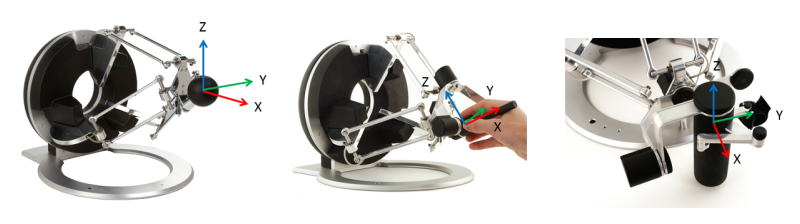
一般规定所有数量均以IUS(公制)单位表示。参考设备坐标系指定 x 轴指向操作员,y 轴指向操作员的右侧,z 轴指向上方。最后,原点始终位于设备物理工作区的中心。
如果触觉设备带有手腕或手写笔,则其手柄的方向使用旋转矩阵表示。下图说明了三自由度、六自由度和七自由度设备的约定。
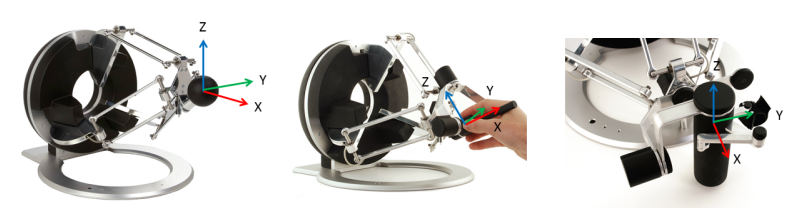 三自由度、六自由度和七自由度触觉设备的参考框架。
三自由度、六自由度和七自由度触觉设备的参考框架。示例 02-multi-devices 是一个简单的应用程序,它显示连接到计算机的每个触觉设备的参考帧。参考框架使用颜色而不是标签来命名不同的轴(分别为 x、y 和 z)。颜色约定为:红色表示 x 轴,绿色表示 y 轴,蓝色表示 z 轴。
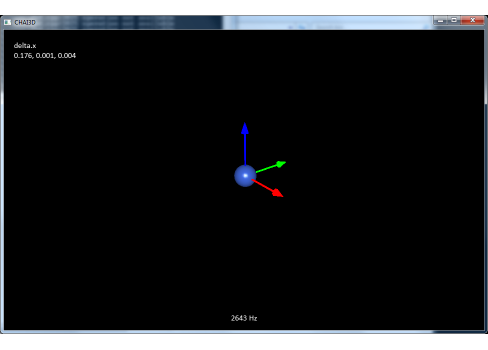 CHAI3D 示例 02-多设备:参考帧和光标。触觉设备处理程序
CHAI3D 示例 02-多设备:参考帧和光标。触觉设备处理程序触觉设备处理程序 (cHapticDeviceHandler) 是一个类,用于搜索并列出连接到计算机的所有触觉设备。
在下面的列表中,我们说明了一个简单的示例,该示例对触觉设备施加力,使其末端执行器朝向其工作空间的中心点:
using namespace chai3d;
// create haptic device handler
cHapticDeviceHandler* handler;
handler = new cHapticDeviceHandler();
// get handle to first available haptic device on the list
cGenericHapticDevice* hapticDevice;
handler->getDevice(hapticDevice, 0);
// open connection to haptic device
hapticDevice->open();
// initialize simulation
bool simulationRunning = true;
double Kp = 25;
cVector3d position(0,0,0);
// haptics loop
while (simulationRunning)
{
// read position from haptic device
hapticDevice->getPosition(position);
// compute force cVector3d force = -Kp * position; // send force to haptic device hapticDevice->setForce(force);
}
// close connection to haptic device
hapticDevice->close();
cMyCustomDevice 提供了一个基本模板,可让您非常轻松地将 CHAI3D 连接到您自己的自定义触觉设备。只需按照文件 CMyCustomDevice 中的 12 个注释步骤操作.cpp并相应地完成代码。根据设备上的自由度数,可能需要实现并非所有方法。例如,如果您的设备不提供任何旋转自由度,只需忽略 getRotation() 方法即可。如果未在设备上实现默认值,则将正确返回默认值。例如,在旋转的情况下,返回单位矩阵。
您还可以重命名此类,在这种情况下,您还需要自定义触觉处理程序以自动检测您的设备。请查阅 cHapticDeviceHandler 类的方法 update(),该类位于文件 CHapticDeviceHandler.cpp 中。只需查看触觉设备处理程序如何查找 cMyCustomDevice 类型的设备。
如果您在实现时遇到任何问题,请检查实例文件 CDeltaDevices.cpp该文件实现了对力维度和 Novint 触觉设备的支持。为了验证实现,请使用01-mydevice示例开始。示例 11-effects 是一个很好的演示,用于验证基本触觉效果在触觉设备上的行为方式。如果您确实遇到振动或不稳定性,请尝试降低设备支持的最大刚度(请参阅文件 CMyCustomDevice.cpp 中的 STEP1)。
确保您的设备与计算机的通信速度也足够快。理想情况下,通信周期应小于1ms,以达到至少1000Hz的所需更新速率。例如,使用慢速串行端口 (RS232) 时通常会出现问题。
3D建模学习工作室翻译整理,转载请标明出处!
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。


